6DOF SATELLITE RPO & INSPECTION SIMULATION (MATLAB)
This project is a full 6-degree-of-freedom relative orbital proximity operations (RPO) and autonomous inspection simulation in MATLAB. It combines Clohessy-Wiltshire translational dynamics with quaternion-based attitude control using reaction wheels, LQR guidance for approach and fly-around, PD attitude pointing toward the chief satellite, and reaction wheel desaturation logic. The deputy performs a controlled approach from 180 m, enters a 25 m standoff inspection trajectory, and maintains line-of-sight pointing throughout.
What I Worked On
- Implemented full 6DOF coupled translation + attitude dynamics with RK4 integration
- Designed LQR-based translational guidance with feedforward CW terms and range band constraints
- Developed quaternion PD attitude controller with reaction wheel torque allocation and unloading
- Created smooth inspection reference trajectory
- Modeled reaction wheel saturation, torque limits, and speed constraints
- Implemented line-of-sight (LOS) checking and body-X pointing toward chief spacecraft
What I Learned
- How to couple translational and attitude dynamics in a realistic 6DOF simulation
- Practical challenges of reaction wheel momentum management and saturation
- Designing smooth, feasible reference trajectories for inspection missions
- Tuning LQR and PD gains for robust performance under actuator limits
- Importance of proper quaternion normalization and shortest-path error logic
- Real-world considerations in autonomous RPO: LOS constraints, hardware selection, and control blending
3D Inspection Trajectory with LOS Cone Visualization
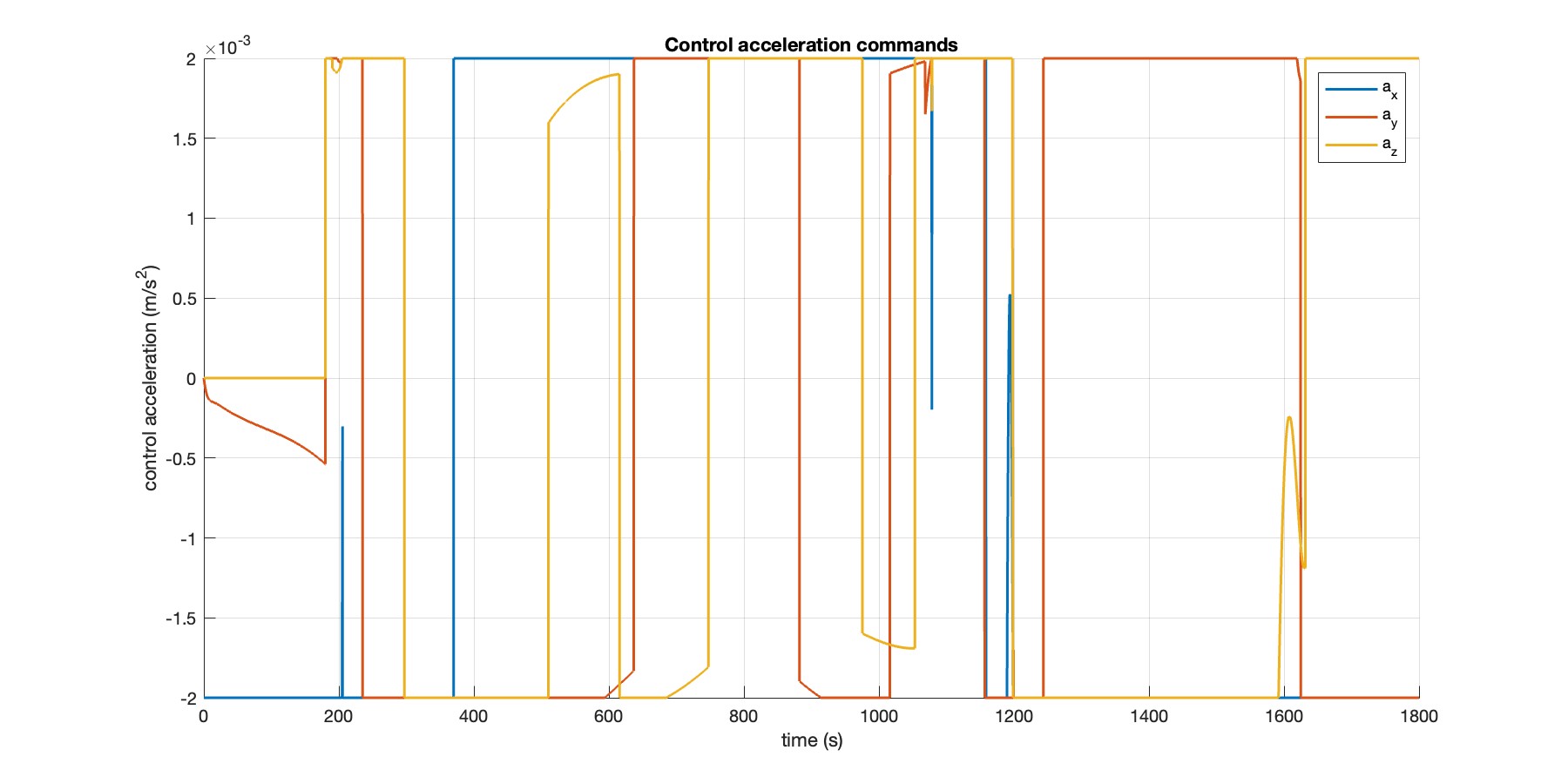
Control acceleration commands (a_x, a_y, a_z)
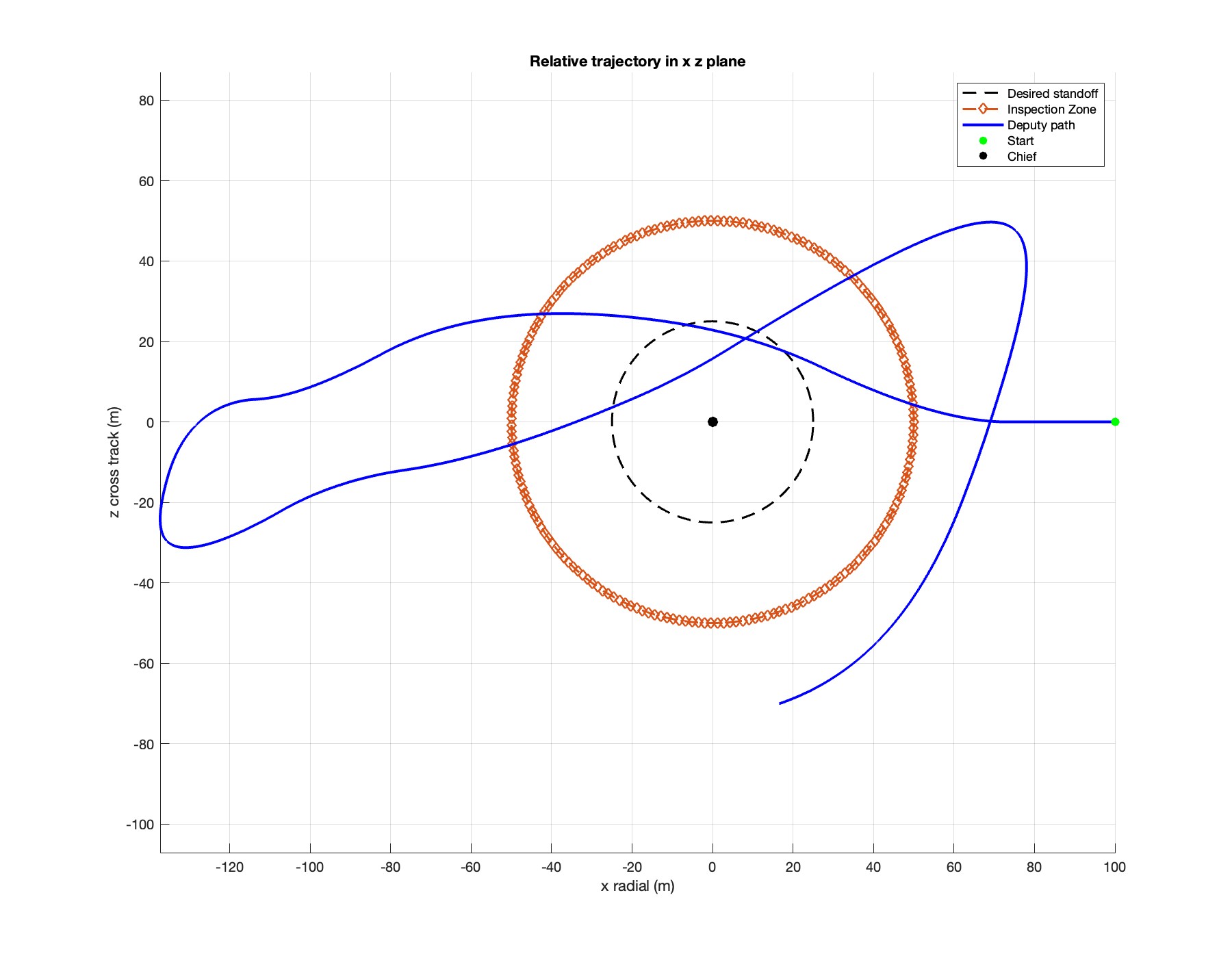
Relative trajectory in x-z plane (Deputy path with inspection zone)
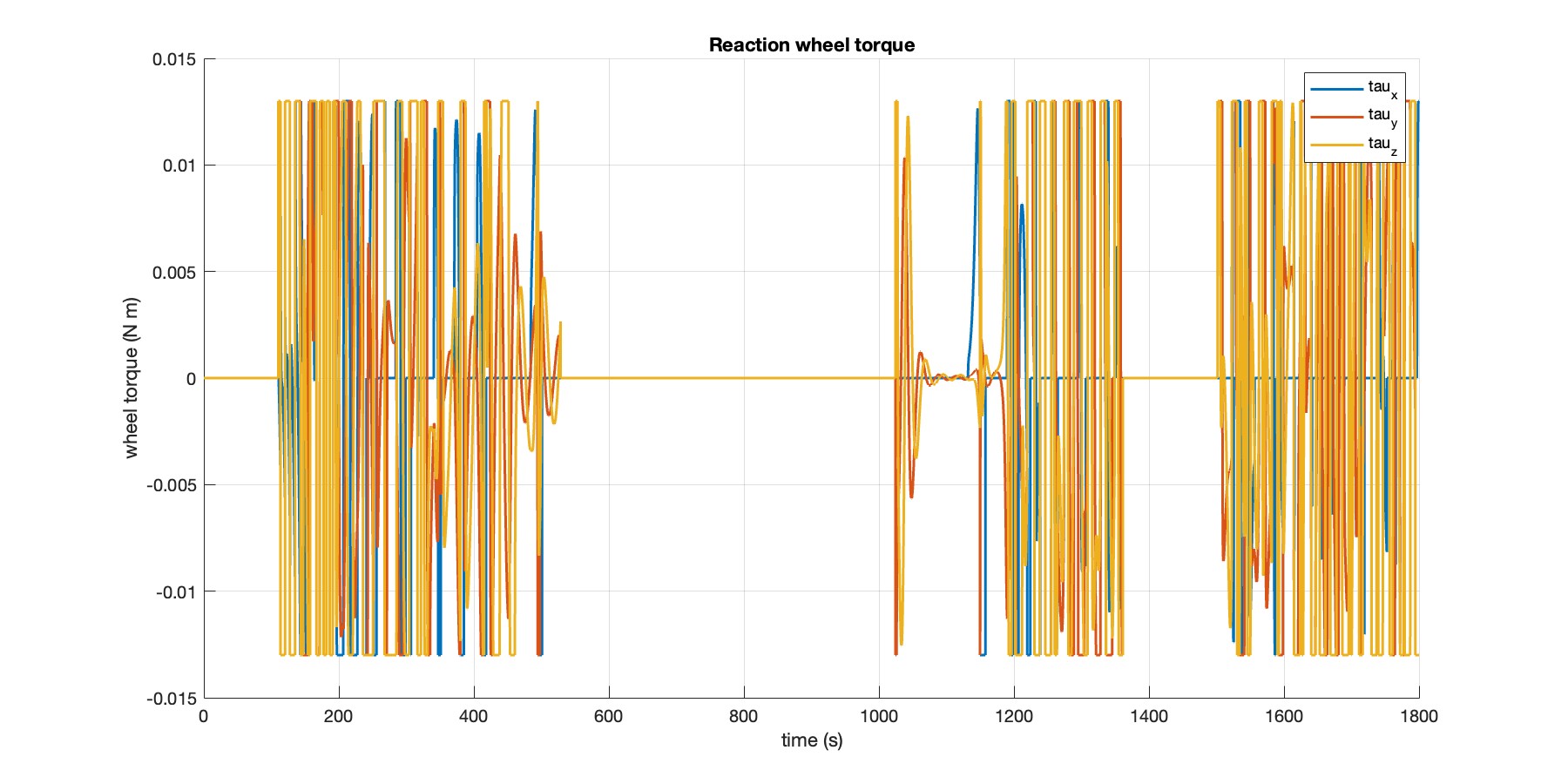
Reaction wheel torque profiles
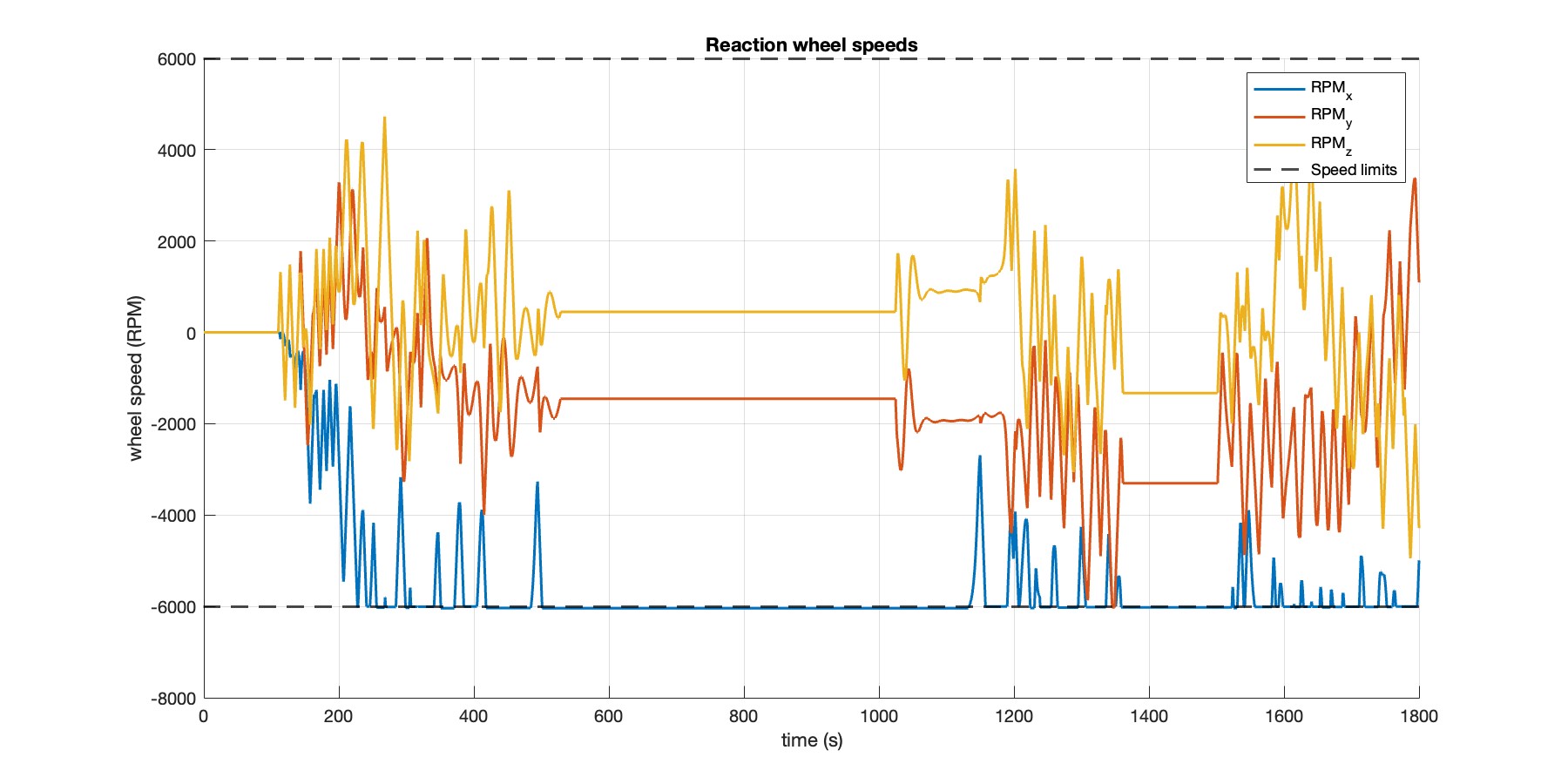
Reaction wheel speeds (RPM) with saturation limits